マーク・レイバートが目指すのは「見て、わかって、やる」ロボット。A Iインスティテュートの研究とは?
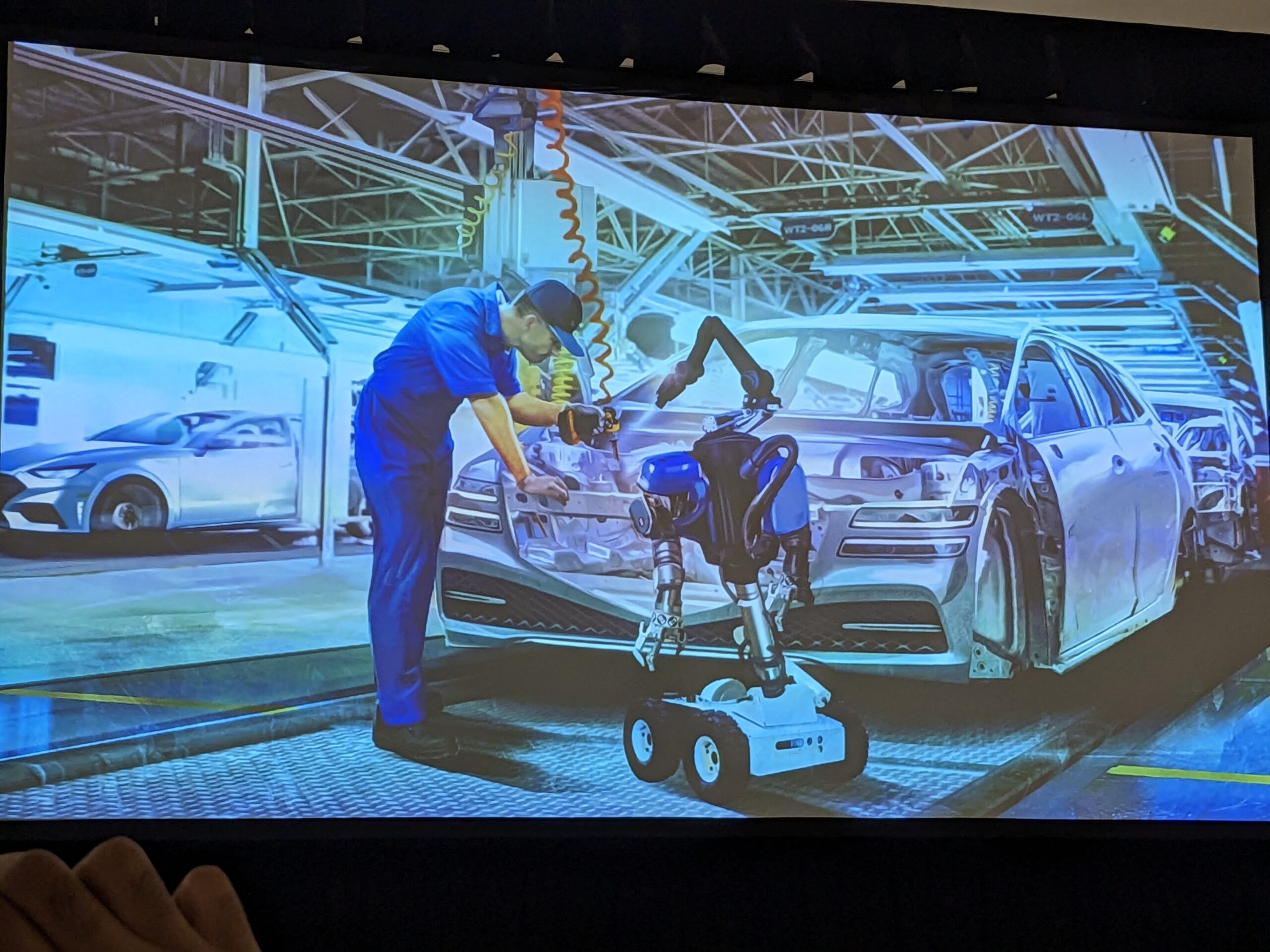
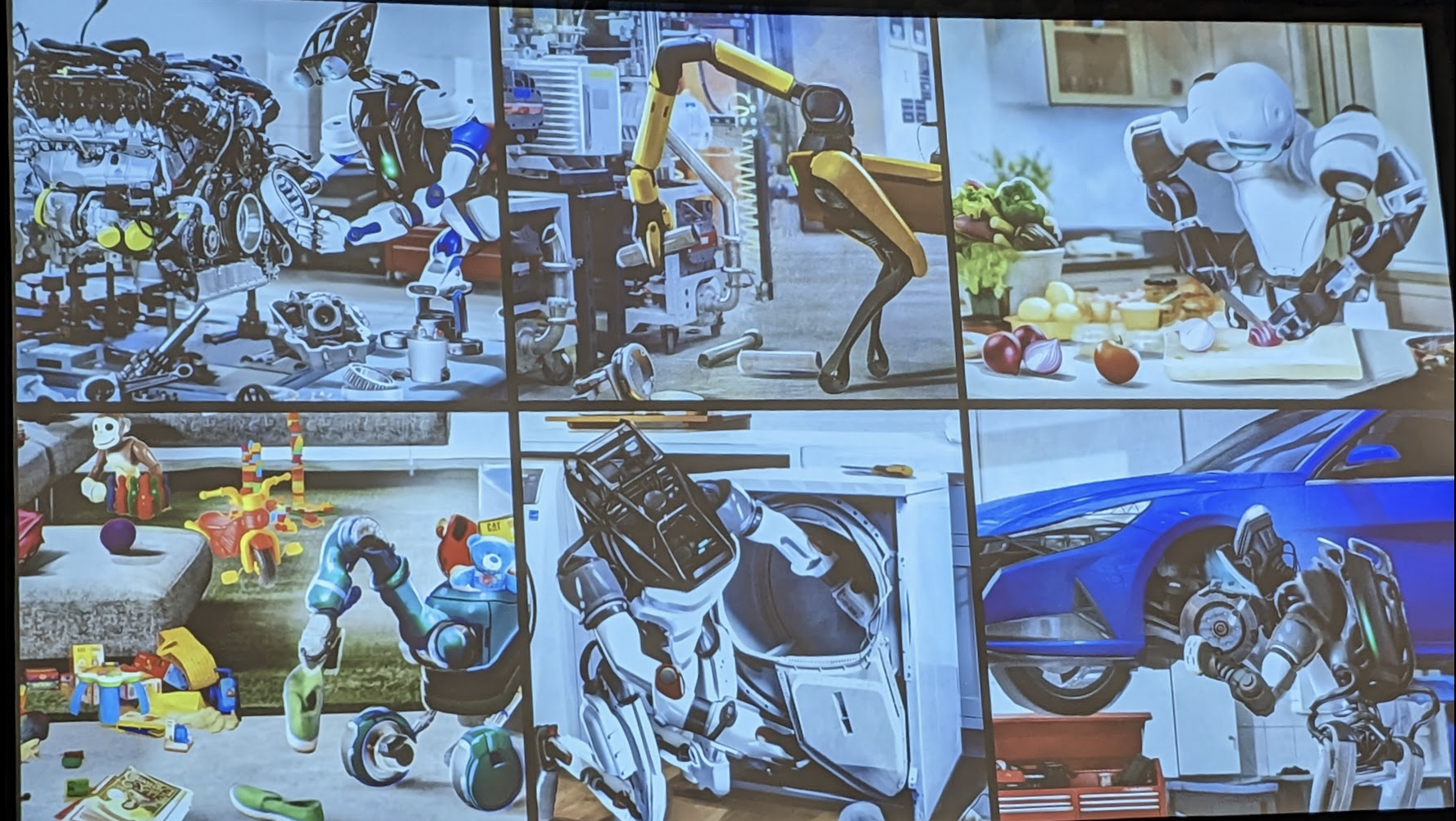
このスライドは、マーク・レイバートが目指すロボットの未来図だ。さる5月11日ボストンで開催されたRobotics Summitで披露した。
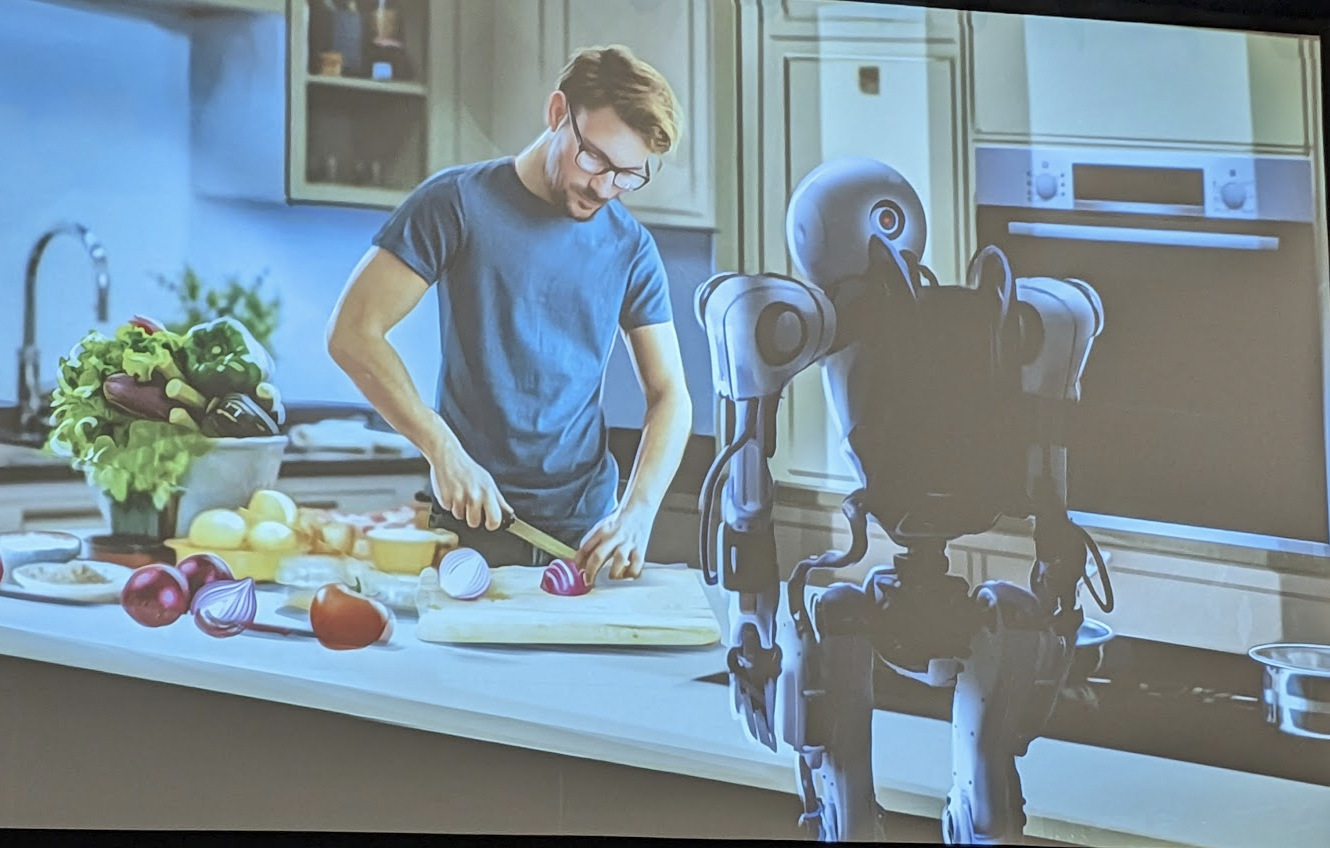
派手な感じのアーティスト・レンダリングで描かれているのは、ロボットが人のやることを見て、理解し、それを真似て実行するさま。自動車の組み立てや料理など、産業現場と生活場面との両方で追求するという。
レイバートは、ボストン・ダイナミクス社の創業者で、昨夏同社を買収した現代自動車グループとの出資によって設立された、ボストン・ダイナミクスAI インスティテュートのエグゼクティブ・ディレクターに就任した。このAIインスティテュートは、ロボットのためのベル研究所のような場所にしたいという。
「ボストン・ダイナミクス社はいい会社になった。けれども自分自身はR&D的な人間だ」とレイバートは、AIインスティテュート設立の背景を説明した。ボストン・ダイナミクス社では、かつて未来的だったロボットが次々と商品化されている。だが、レイバート自身は法的責任を心配しなくてもいい立場でロボット研究を続けたかったようだ。未来志向の現代自動車グループの会長がそれを理解してくれたという。

AIインスティテュートで行う研究は、次の4分野だ:
- 認知AI(高次レベルでの決定を可能にする)
- アスレチックAI(体操選手のような全身体的な動きを可能にする)
- オーガニック・ハードウェアデザイン(AIを利用した先端的なハードウェア)
- 倫理とポリシー(政策、規則)
長期的な視野に立ち5〜10年後、あるいはもっと先の世界を見据えて研究を進めるが、それまでに飛石のようにステップが設けられ、その都度成果を明らかにしていく。
この4分野を統合して3つのプロジェクトが進められている:
- Watch, Understand, Do(観察して、理解し、実行する)ロボット
- 器用なモバイル・マニピュレーター
- まだ明かせないプロジェクト(とは言え、脚付き自動車のようなものが想定されていると見られる)
観察して、理解し、実行するロボットでは、周りの世界を総合的に理解することを目指している。これは産業現場では監視するだけでなく、予測して故障を修理までするようなことを想定している。「sequence of events」とレイバート氏は何度も表現し、つまり一連の出来事、やることを自ずと認識して実行することだ。
また、器用さでは「extrinsic grasping」と表現したように「思う」が、モノへの軌道を計画するのではなく、「モノとの接触から得られるエネルギーを管理する」方法で把持する方法を評価しているようだ。「静的な把持ではなく、juggling的なもの」とのことで、つまりモノをハンドでもてあそぶようなアプローチということだろうか。
ところで、レイバート氏は自信のない若者だったと語る。「大学院時代や卒業後にもっと自信があったらよかったのだが」と言う。偉業を成し遂げて堂々としている同氏には似つかわしくない発言だが、当時「好きなことをやっているんだから、もっと頑張れ」とハッパををかけてくれた先輩の言葉に一念発起したそうだ。