カテゴリー: ロボット研究
2013/07/13
Categories:
ニュース •
ロボット研究 •
軍事用ロボット
先だって紹介したバーチャル・ロボティクス・チャレンジ(VRC)を勝ち抜き、今年末のトライアル戦に参加する7チームが利用するロボット、アトラスを、DARPA(国防総省高等研究開発局)が公開した。
アトラスを製造したのはボストン・ロボティクス社で、DRC用に改訂が加えられている。VRCではシミュレーターを利用してコントロール・ソフトウェアのできばえが競われたが、今度はそれを本物のロボットを動かすのに利用することになる。

DRCに使われるアトラスの最終型(DARPAサイトより)
続きを読む
2013/06/29
Categories:
ニュース •
ロボット会社 •
ロボット研究
DARPA(国防総省高等研究開発局)が主催するロボティクス・チャレンジ(DRC)は、ロボット界の一大イベントである。これは、災害時の救援を前提としたタスクをロボットに競わせるもので、2014年末のファイナル戦まで段階的に試合が続く。
そのうちのバーチャル・ロボティクス・チャレンジ(VRC)部門の選抜が先日行われ、勝者チームが決定した。

ホースを取り付けるバーチャル・ロボット
続きを読む
2013/06/08
Categories:
ニュース •
ロボット研究
ロボットアームは、3Dプリンターと同様の新しい造型ツールとしても注目を集めている。
3Dプリンターと異なるのは、機械自体のサイズやノズルの可動範囲に制限を受けないこと。だから、2Dをレイヤーして3D造型を作り出すのではなく、直接3Dにプリントアウトが可能。つまり、空間を自在に動くロボットアームは、よりダイナミックな造型に挑むことができるのだ。
それを実にポエティックに見せたのは、バルセロナのカタロニア先端建築研究所(IAAC)の研究者たち。アメリカの話題ではないが、美しいので取り上げた。速乾性のプラスティック素材がノズルからプリントアウトされ、それがあらかじめプログラムされたロボットアームの動きに従って空間にモノを生み出していく。下ビデオは約3倍速。
ロボットは、こんな表現の領域に関わることも期待されるのだ。
『dezeen』の関連記事はここ。
2013/06/01
Categories:
ニュース •
ロボット研究 •
医療用ロボット
脳の信号を利用してロボットを動かしたり、義足を操作したりする研究は数々あるが、その一方で局所的な筋肉や神経の信号を利用した研究も行われている。DARPA(国防総省高等研究開発局)のサイトに、そうした研究の最新成果を収めたビデオが公開されている。
この研究は、シカゴのリハビリテーション・インスティテュート(RIC)で進められているもので、切断された関節の神経を再接続し、残る筋肉を使って義足や義手などの人工器官を動かすことができるようにしている。脳にチップや電極は埋め込まれておらず、また義手を動かすための外部のコントローラーもない。
このサイトには、ほかにも指先の感触フィードバックを再現する研究のビデオもある。いずれもDARPAの高信頼度神経インターフェイス技術(RE-NET)プログラムの下で進められている研究である。人体をオーグメントするロボット技術の進化を感じさせる研究だ。
2013/06/01
Categories:
ニュース •
ロボット研究
われわれはゴツゴツとしたメカニカルな外観のロボットに慣れ親しんできたのだが、ロボット研究の世界には、別の流派も生まれている。
カリフォルニア大学バークレー校バイオエンジニアリング学部の研究者らが、光に反応して動く素材を開発。フニャフニャ、ムニュムニュとした手触りの柔らかなロボット開発に利用できると、話題になっている。
この素材は、弾性のある合成タンパク質とグラフェン(炭素を組成する原子1個分の厚みの炭素シート)を合わせたもの。これに近赤外光をあてると、グラフェンが発熱し、その熱が合成タンパク質に伝わり、合成タンパク質は熱くなると水分を出し、冷めると水分を吸収する。植物の細胞が伸びたり縮んだりするのを模倣でき、両面で素材の密度を変えることで、生き物のように動かすことができる。
この素材は、ロボットの柔らかな部品として用いられることも予想されるほか、体内のドラッグ・デリバリーや再生医学での応用も期待されるという。
研究のプレスリリースはここに。論文はここに。ギズモード関連記事はここに。
2013/06/01
Categories:
ニュース •
ロボット研究
西イングランド大学ブリストル校ロボティクス学部のアラン・ウィンフィールド教授が考える、ロボット開発の新しい機会に関するスライドがロボハブに掲載されている。
このスライドは、先頃ロンドンで開かれた『ロボティクス: イノベーションからサービスへ』と題されたミーティングで行われたプレゼンテーションに用いられたもの。いくつか興味深いポイントがあるので、紹介しよう。
ひとつは、「ダイナミック・オートノミー」という概念。これまでロボットは完全なる自律性(オートノミー)を備えていなければならないと考えられてきたが、ニュー・ロボティクスにおいてそれは神話になりつつあり、それよりも限ったタスクを自律的に行うダイナミック・オートノミーによってサービス製品として成立しているという点。自律性をより広く捉えることが鍵になるということだ。

「ダイナミック・オートノミー」とは?
(credit: A. Winfield)
もうひとつは、すぐ製品化できるようなロボットはもう先取りされてしまったのかという疑問に対して、機会はまだまだあるということ。特に「コンパニオン・ロボット(介護ロボットなど人に寄り添ってサポートするロボット)」、「ウェアラブル・ロボット(身体障害者やリハビリ向け)」、「ダイナミック・オートノミーを備えたテレプレゼンス・ロボット」の分野が期待できるとしている。
その上で、ロボット業界にイノベーションを起こすには、研究と業界との新しいパートナーシップ(たとえばロボット技術のクリアリングハウス設置など)や、商用化のための柔軟なプロセス(キャンパス内のスタートアップなど)が重要としている。
2013/06/01
Categories:
ニュース •
ロボット研究 •
家庭用ロボット
コーネル大学のロボット学習ラボのパーソナル・ロボティクスグループの研究者たちが、マイクロソフトのキネクトを利用して、特定の状況における人間の動作の流れをロボットに学習させている。
研究者たちは、たとえば歯を磨いたり、シリアルにミルクを注いだり、薬瓶を開けたりといった活動をおこない、各活動に際して45秒のキネクト・データを記録、それをロボットにコンパイルして、各活動に伴う動作を理解させるようにした。
そうして学習したロボットは、人間がある動作を行うと、次の動作を予想して手助けに出てくる。ビデオでは、鍋を持ち上げて冷蔵庫へ向かおうとすると、冷蔵庫のドアを開けてくれたり、カップを差し出すと飲み物を注いでくれたりするロボットの様子が撮られている。
こんなロボットなら、誰かさんよりはよほど気が利くかも。本能的とも言える反応を可能にすることは、AI研究にとっては重要な進歩という。
コーネル大学では、このコードを他の研究者も活用できるようオープンに公開している。
エクストリームテックの関連記事はここ。
2013/05/29
Categories:
ニュース •
ロボット研究
カーツワイルAIが、宇宙コロニーのために構想されているロボット建設の方法に触れている。
宇宙コロニーは、米国宇宙協会(NSS)が人類の宇宙移住のために進めている計画の一環で、約500平方マイル(約5000平米)の面積を持ち、そこに都市、農場、森林などが作られる。
建設は、宇宙に浮遊しながらジグを利用した方法で進められ、最初の構造体に固定した状態で次の構造体のための部材をアッセンブルし、組み上がったところで外部に押し出すという過程を繰り返して拡大されていくという。惑星や月の砂塵を利用して作られる部材を搬入するために、タグ宇宙船にもドッキングされる。
ロボットと3Dプリンターが、宇宙コロニー建設で大いに活躍する模様。
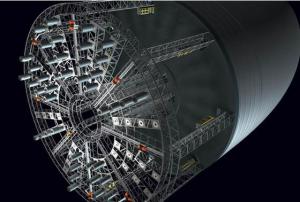
KurzweilAIより。ロボットによって建設される宇宙コロニーの構造体(credit: A. Nesterova and J. Strickland)
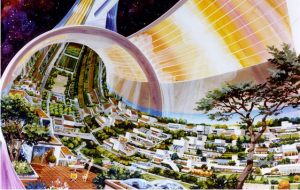
KurzweilAIより。宇宙コロニーの内部はこんな風景(credit: D,Davis/NASA Ames Research Center)
2013/05/26
SRI(スタンフォード・リサーチインスティテュート)インターナショナルは、政府機関や企業から受託して、先端技術に関わる研究開発やそのサポートを行う非営利組織である。シリコンバレーのメンロパーク市に拠点を持ち、研究開発内容は生物科学、医学、宇宙工学、素材産業、情報システム、コンピュータ科学、環境科学など多岐にわたっている。
ことに、ロボット開発の歴史は長く、現在もエンジニアリングR&D部門のロボティクス・プログラムに引き継がれている。有名な手術ロボットであるダ・ヴィンチが最初に開発されたのもここで、インテューイティブ・サージカル社は50社以上もあるSRIのスピンアウトのひとつである。
シリコンバレーのロボット業界の中心人物のひとり、SRIロボティクス・プログラムのディレクター、リチャード・マホーニー氏に、ロボニュースがインタビューした。

SRIロボティクス・プログラムのディレクター リチャード(リッチ)・マホーニー氏
続きを読む
2013/05/26
Categories:
ニュース •
ロボット研究
『IEEE Spetrum』誌が、「ロボットがコーヒーを買いに行くのが、なぜ大切なのか」を説明している。同誌に寄せられたコメントへ回答するために書かれた記事らしい。

というのも、ロボット研究はおもしろそうに見えるけれども、一体それが現実的にどんな役に立つのかわからない、というタイプのものも多いからだ。記事では、スタンフォード大学のPR2が独りでコーヒーを買いに行くのが、ロボット研究をどう推し進めるのかを解説する。ポイントは以下。
- 複数の2Dマップの間をナビゲートする: 可動型ロボットは、いろいろなフロアー間をナビゲートするのがたいてい苦手だが、スタンフォード大学の研究者たちはポータルを経由して複数の2Dマップがリンクされるゲートウェイを開発した。
- 自信をもってエレベーターに乗降する: ロボットが自律的にエレベーターを利用するのは簡単ではない。まずエレベーターを見つけ、上下を判断してボタンを押し、エレベーターが到着したのを感知し、人がいないことを確認して乗り込み、正しいボタンを押し……、と無数の判断をビジョンと操作を駆使して行う。
- ガラス張りの重いドアを開く: ロボットが透明なガラスを認識するのは困難だが、アメリカ障害者法(ADA)では、ドアの取っ手は同じ高さに設置することを義務づけている。PR2はこの高さに取っ手の表面を認めるとそこにドアがあると認識する。重いドアを開けてそのままに保つのは、PR2のベース部分の重力とパワーを利用している。
- 人とロボット間のやりとり: コーヒーを受けとる際には、店員がPR2の手にカップを強く押し付けてくれた方が簡単だが、研究者たちは手に取り付けられたカメラが物体を感知し、その後グリップ(つかみ)を作動させるようにしている。人間同士のような、手荒でないやりとりを可能にするためだ。
こうしたこと以外にも、実際にロボットにタスクを与えることで、現実世界で起こりえるさまざまな課題を意識するきっかけになる。人がいたり障害物があったらどうするか、エレベーターで先に誰かが異なったフロアーのボタンを押していたらどうなるか、ドアのところで人が出入りしていたらどうなるかといったことだ。
ロボットにコーヒーを買いに行かせるのはただ面白がっているからではなく、大切な研究成果を現実に活かすための方法だと記事は強調している。
ビデオはここに。






