2020/09/10
TRI流ソフト・グリッパーとは?
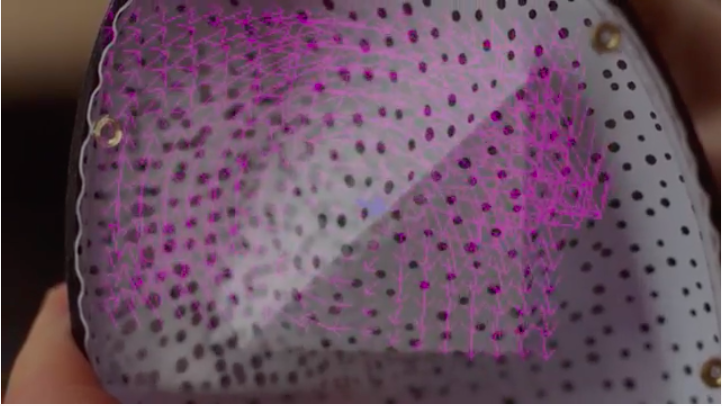
トヨタ・リサーチ・インスティテュート(TRI)が、ホームロボットのためのソフト・グリッパーを開発している。その名も『ソフト・バブル・グリッパー(Soft Bubble Gripper)」。空気を含んだエラスティック表面を持ち、グリッパー内部にカメラを搭載、表面の変形を計測する。グリッパーはパッシブに把持し、アクティブに適用されたフォースを計測することが可能になる。
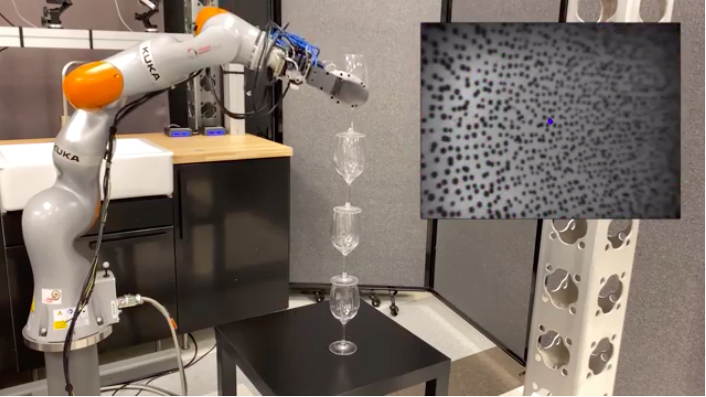
ここに到るまでは、何段階ものグリッパーを経た。最初は1本のアームの先に大きなバブル型エンドエフェクターが装着されたもの。その次は、それを2本のアームにした。1本のアームの先に2本の小さなバブル型フィンガーをつけた現状のグリッパーは、リアルタイムの触覚センシングを備え、把持している物体の形状やフォース、そして物体とフィンガー間のフォースを感知する。

グリッパー内部のToF深度センサーからのデータによって、ビジョンを触覚に変え、まるで人間の指がカバンの中から鍵を探し出すようなタクタイル(器用)さを目指したという。
ビデオを見ると、例えばコップがカウンターの上に安全に配置できると感知してからグリッパーを緩めるなど、かなり高度なことができるようだ。ホームロボットなので、低価格に抑えられるよう素材を選択したという。
こんなグリッパーは、ホームロボットがますます現実に近づいていることを感じさせてくれる。