アマゾン・ピッキング・チャレンジ(APC)2016は、チーム・デルフトが優勝。勝利のしくみは?
今週、ドイツのライプツィッヒで開かれていたアマゾン・ピッキング・チャレンジ(APC)の結果が発表されている。
それによると、オランダのチーム・デルフトが収納(stow)と取り出し(pick)のいずれでも優勝したようだ。

取り出しタスク最終戦に望むチーム・デルフトの様子
チーム・デルフトは、デルフト工科大学のロボティクス・インスティテュートと、そこからのスピンオフ会社であるデルフト・ロボティクス社の混成チームである。
収納チャレンジには14チームが参加した模様で、チーム・デルフト以下2位はチーム・ニンブロ・ピッキング(独・ボン大学)、3位はMIT(米)、4位はPFN(日・プリファード・ネットワークス社)、5位はIITK-TCS(印・IITカンプール校とタタ・コンサルタンシー)と続いている。
取り出しチャレンジでは、2位はPFN(日)、3位はチーム・ニンブロ・ピッキング(独)、4位はMIT(米)、5位はチームK(日・東京大学JSK)となっている。ただし、1位のチーム・デルフトとPFNはスコアでは同点を獲得、最初のピックまでにかかった時間が前者30秒、後者1分7秒と差があり、これで順位が決定されたようだ。
今年は日本からAA-Team(東京大学)、C^2M(中部大学、中京大学、三菱電機の混成チーム)、チームK、PFNと4チームが参加し、C^2Mも取り出しで健闘している。
ロボニュースは残念ながら取材に行けなかったが、ロボビジネス・ヨーロッパで偶然チーム・デフルトのメンバーに説明を聞いていた。
その時の話によると、まず、チーム・デルフトには深層学習の専門家がいるという。そして、準備期間中に各アイテムを50の異なったアングルから画像に収めてデータベースを作っている。現場では、ざっと棚を見て、アイテムのだいたいの場所を把握し、その後シーンの3Dモデル化で正確な位置を特定することがこれによってできる。
その後、どうやってピックするのかを考えるわけだが、すでに何通りかの方法を教えてあると言っていた。現場に来るまでには、ロボットはけっこう頭がよくなっているのだ。
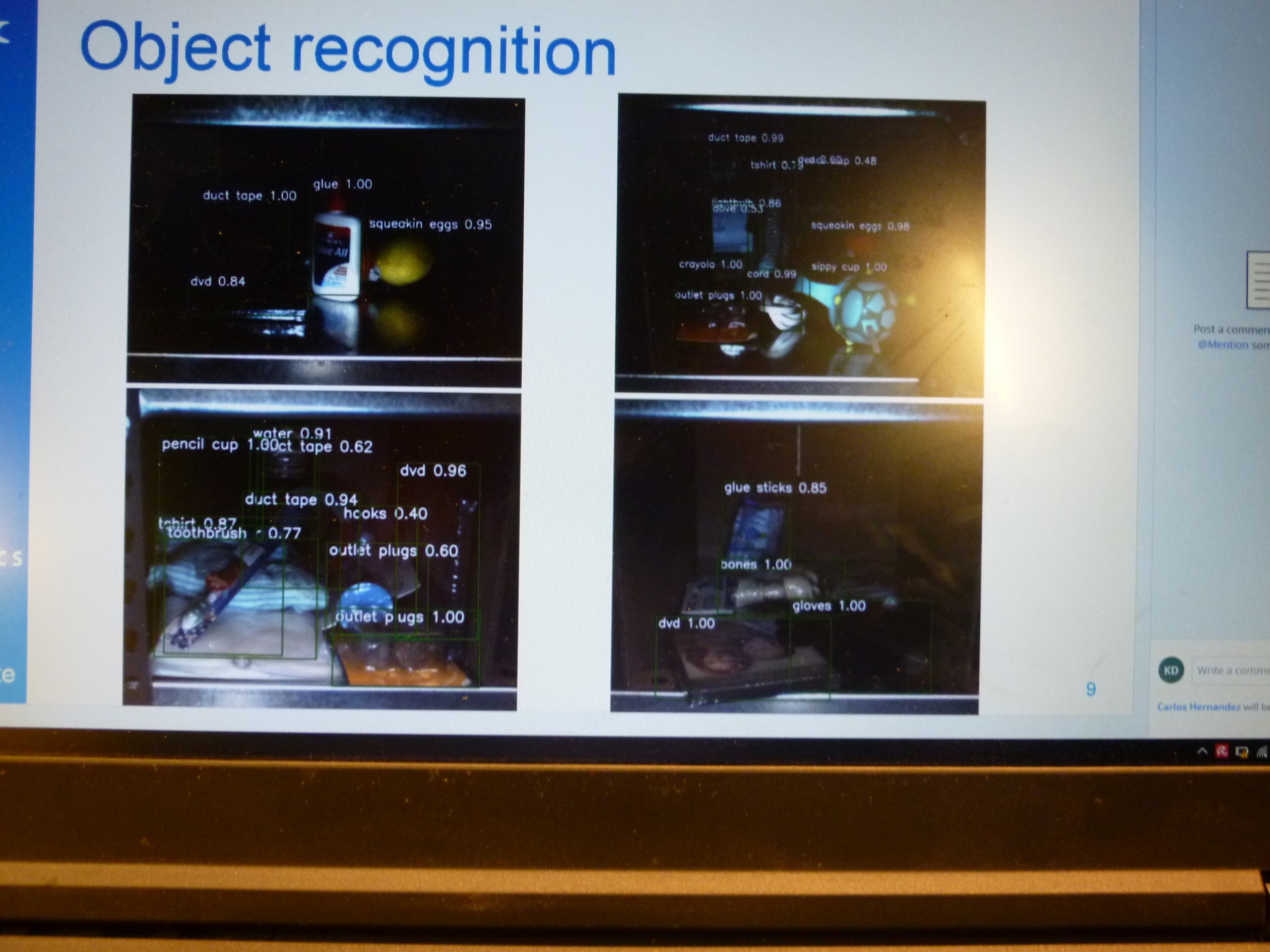
深層学習技術を用いて、アイテムを特定する、という説明で見せてもらった画面
他のチームは、1、2の例外を除いて深層学習技術は使わないのではないかと、チーム・デルフトのメンバーは見ていた。深層学習には予期できない部分もあるが、リスクを取ろうと決めたという。実際には、日本のPFNと接戦になったわけで、これからロボットにも画像面でAIがどう使えるのかの実験が盛んになるだろう。
そして、ハンドがまた凝っていた。この時点(6月初頭)で、すでに3回作り直していたとのことで、APCまでにさらに何度か作り直すだろうということだった。
ハンドについては、昨年の第1回APCをよく研究したのだそうだ。その結果、吸引と把持の両方ができる機構にし、2つの吸引カップのうち、先のものは蛇腹状チューブで方向が変えられ、手前のものは吸引を閉じることができるようになっている。

6月初頭時点でのチーム・デルフトのハンドのクロースアップ
同チーム説明ビデオが以下。
そしてAPC2016のビデオは、いくつかここにある。実況中継的ツイッターは、ここ。APCのツイッターはここだが、ビデオはまだアップされていないようだ。そのうち上がるだろう。