<イベント・レポート>DARPAロボティクス・チャレンジ決勝戦1日目 倒れるロボットがたくさん
午前7時から開会式が開かれた第1日目。その後早速チャレンジに移った。
昨日のギル・プラット氏の話では、2日目まで続く決勝戦に備えてロボットを痛めないために、チームは初日は緩めに臨んでくるだろうということだった。ロボットが転倒して壊れてしまっては困る。エネルギーを抑えて「転んだりしないように」するだろうという予想だったのだが、ふたを開けてみると転んだロボットが多かった。
チームAero(日)のロボットも転倒。
スイスイとはいかないまでも、予選に比べるとロボットの速度は確かに速くなった。少しずつ、ぎこちなくても、ほとんどのロボットはちゃんと前進するし、タスクの中では扉を開ける、バルブを回すは軽々こなすといった感じだ。自動車を運転する場合は、スピードが速い。また、自動車から自力で降りるロボットもいた。
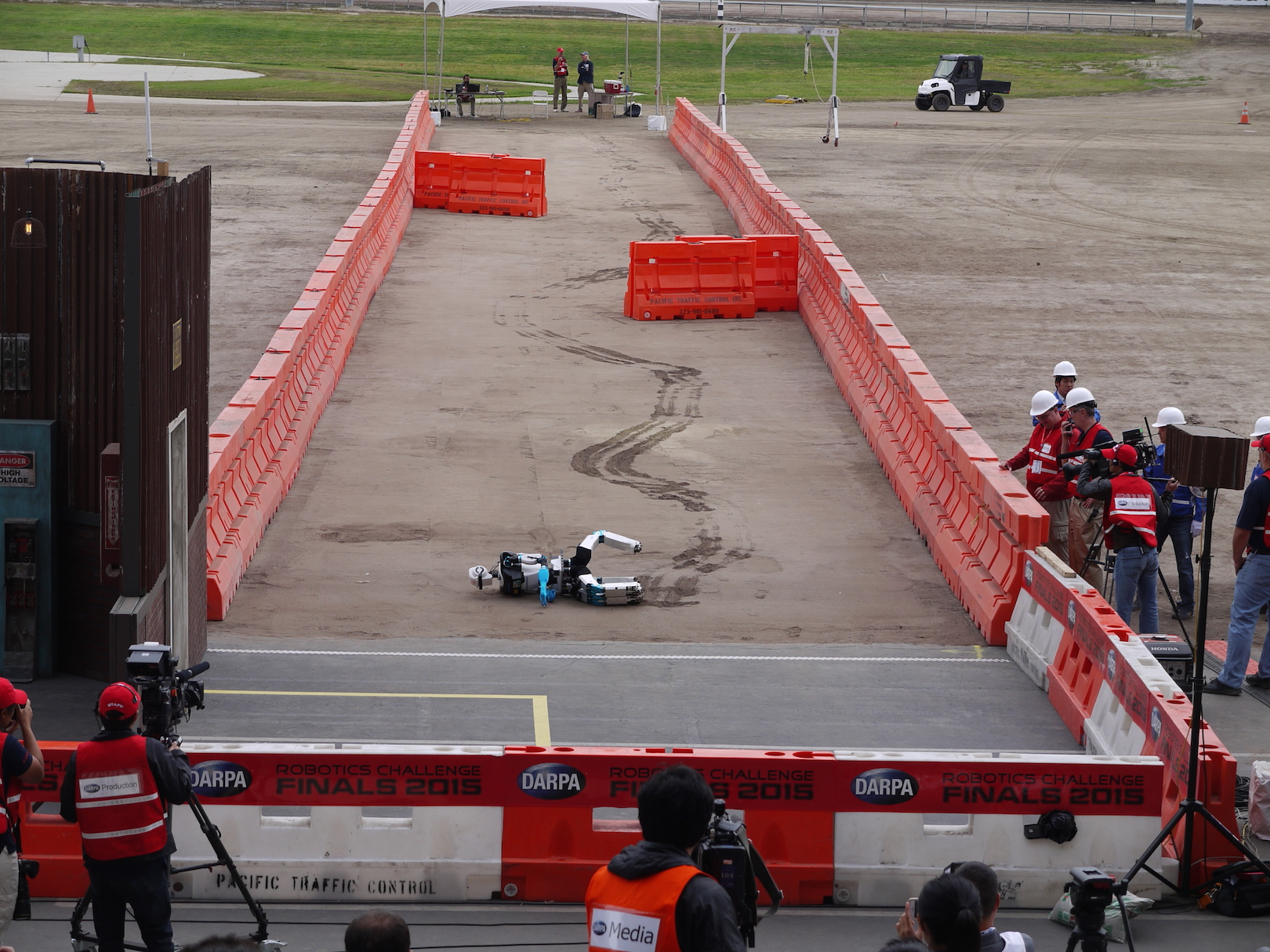
その一方で、転んでしまうロボットが方々で見られた。砂に足を取られる、バランスを失うなどの理由で、ロボットが倒れた。階段を昇る途中で派手に倒れるロボットもいた。観客からはもちろん悲鳴と落胆の声が上がる。けれども、チームの介入で起こされてリスタートを切った後は、半分くらいのロボットが何もなかったかのように、タスクを遂行していた。驚いたことに、タータン・レスキューのロボット、チンプは、重い音を立てて転倒したものの、自分で起き上がった。

チームWALK-MANのロボットは、扉の前で転倒
チームHKUやチームIHMCロボティクスのように、1回だけではなく2回転倒したロボットもいたが、どのロボットにも大きな損傷はなかったようだ。

チームNEDO-JSKのロボットが運び出されるところ。

チームMITのアトラスも転んだ。
下のビデオは、チームIHMCロボティクスのアトラス「ラニング・マン」が一番最後の階段を上るタスクのところで、派手に転倒したところ。これでも無傷だったようだし、このチームは最高点に近い7点を獲得している。
さて、第1日目の得点表は以下。DRCのアプリから取ったもの。



中には、面白い動きを見せてくれたロボットもいた。たとえば、降車するアトラスは迫力がある。チームIHMCロボティクスのアトラスがそうだった。しかし、チームによるとこれは自律的な動きではなく、人間のオペレーターの操作によっている。

車から降りるチームIHMCロボティクスのアトラス
またチームKAISTは着実にタスクをこなしていたが、ロボットのコンフィギュレーション(形状)もそれに合っているようだ。車から降りる時は、無駄なくスルリと降りるのが印象的。

不思議な方法で降車するチームKAISTのロボット
このHuboロボットはまた、歩く、ひざまずいて車輪で移動する、脚部と上半身部が別々に回転するなど、ヒューマノイドでありながら節足動物のようなしくみが統合されている。タータン・レスキューのチンプやチーム・ロボシミアンにも通じる新しいタイプのロボットのようにも思われた。
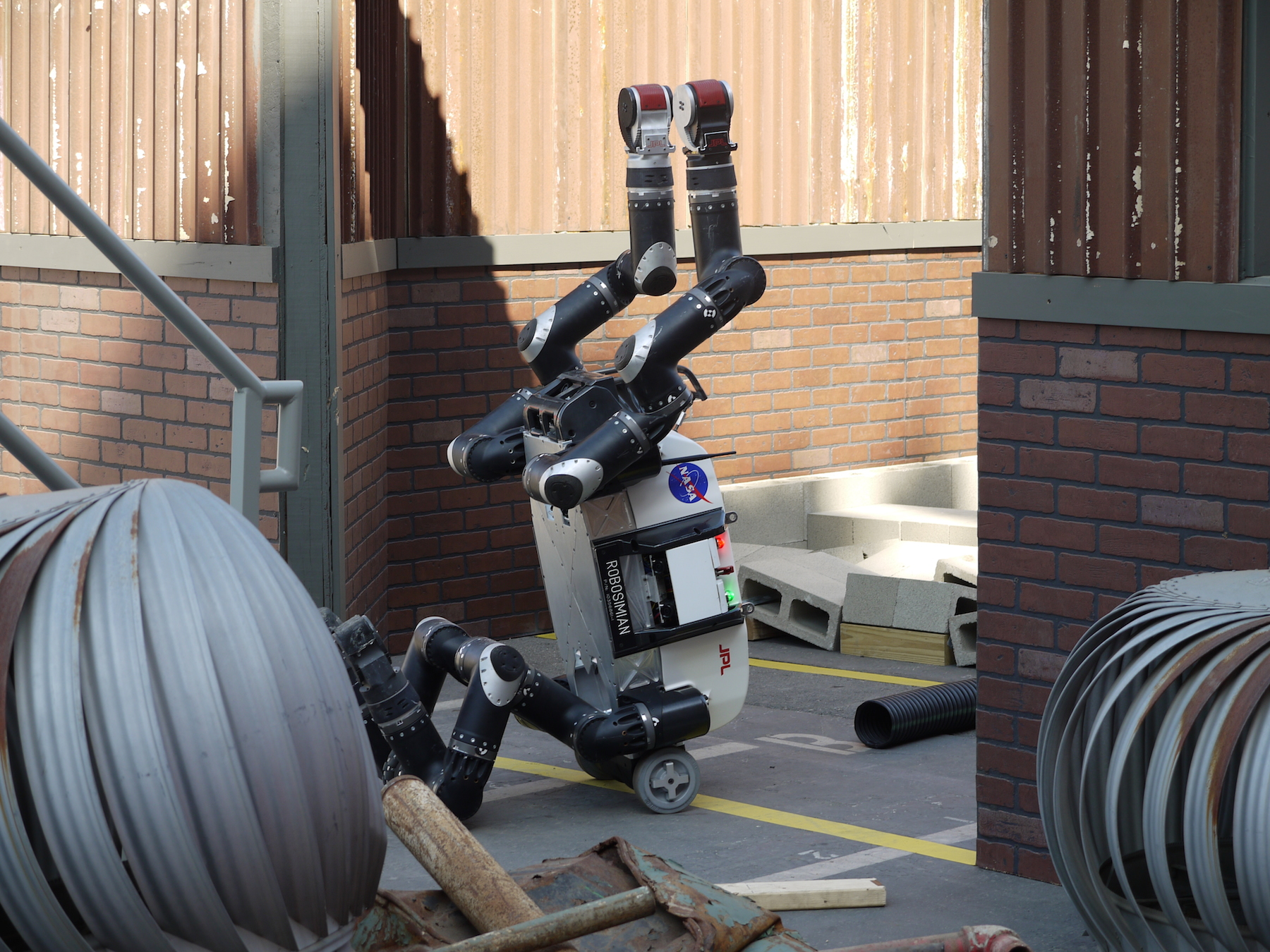
ロボシミアンも、脚と車輪を都合よく入れ替える
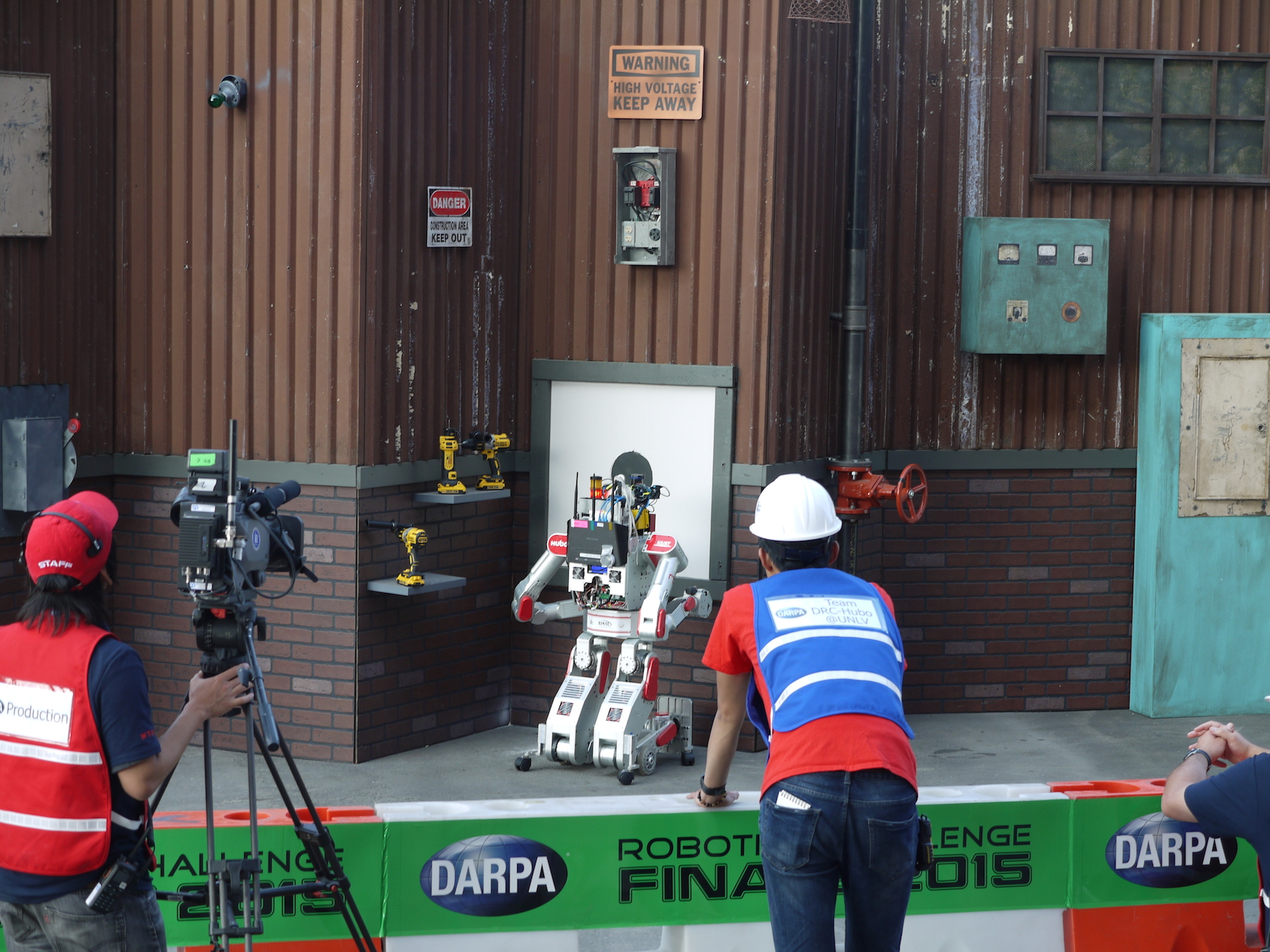
チームDRC-Huboのロボット
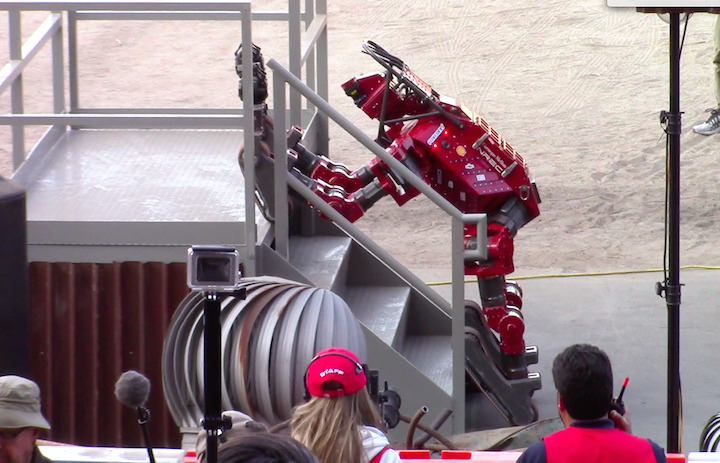
タータン・レスキューのロボット、チンプ