ボストン・ダイナミクス社のハンドル、正式ビデオはこれ
先だってお伝えしたボストン・ダイナミクス社の新しいロボット「ハンドル(Handle)」。同社がユーチューブに正式なビデオをアップしている。
バランスもジャンプも難なくこなすハンドル(http://www.bostondynamics.com/より)
同社のサイトにはまだ解説はないが、ユーチューブに添えられた短い説明によると、ハンドルは6.5フィート高(198センチ)、最大時速9マイル(14.5キロ)で走行し、4フィート(1.22メートル)のジャンプをこなす。 電動および油圧アクチュエーターの両方が電力で駆動し、1回の充電で約15マイル(24キロ)の連続走行可能。
これまで同社が開発してきた2本、4本足ロボットと同様のダイナミクス、バランス、マニピュレーションの原則を利用しているが、駆動ジョイントが10個しかないため機構はかなりシンプルなものとしている。足の先に車輪をつけたハイブリッド型にしたのは、平面を効率的に走行できる車輪とほぼどこでも歩行できる足の利点の両方を統合したかったからとのこと。
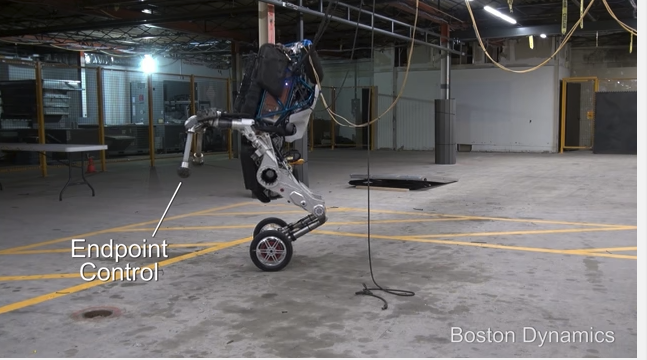
確かにバランスやジャンプ力が目立つ上、全身を伸縮させたり空中のエンドポイントを定めたりできるのが面白い。途中で100ボンド(45キロ)の重量を持ち上げる様子も出てくる。やっぱり倉庫で荷物を運んだり、荷物を届けたりすることが目的だろうか。「研究用ロボット」と書かれてはいるが……。
ただ、どちらが前でどちらが後ろなのかがよくわからない、不思議な生き物感がいっぱいだ。
『IEEEスペクトラム』にボストン・ダイナミクス社マーク・レイバートCEOの短いインタビューが掲載されている。それによると、昨年夏から開発を始め、6ヶ月後にはほぼこのようなかたちで動作するロボットができたとのこと。アトラスの電源、アーム、上半身を利用して開発をスピード化したという。