2014年たまっていたイベント・レポート<その9>『コラボラティブ・ロボット国際ワークショップ』
今年行ったイベントのたまっていたレポートをお伝えする第9回。今回は9月末にシリコンバレーのサンホセで開かれた『コラボラティブ・ロボット国際ワークショップ』についてご報告。
コラボラティブ・ロボットというのは、現在注目が集まる「人間と一緒に仕事をするロボット」のこと。別名「コー・ロボット」とも呼ばれるものだ。

リシンク・ロボティクス社のロドニー・ブルックス氏
この会議では、コーロボットを開発するロボット・メーカーの他、従来型の産業ロボット・メーカーの中でもコラボラティブ・ロボット開発を行っている企業関係者らが登壇し、現状や課題を共有した。
コラボラティブ・ロボットは大きく分けて、リシンク・ロボティクス社やユニバーサル・ロボッツ社などのスタートアップ企業が開発する新しいタイプのロボットと、既存のメーカーが開発しているモバイル・マニピュレーターのふたつがあるようだ。
まず、リシンク・ロボティクス社創業者のロドニー・ブルックス氏の講演から抜粋しよう。
同氏は、これまでの産業ロボットはソフトウェア・プラットフォームの上に作られてこなかったが、今後はアップデートを断続的に行えるようなアプローチでロボットを考える必要があると強調した。
そして聞き間違いでなければ、同社のバクスターはそうしたソフトウェアのアップデートによって、速度は18ヶ月ごとに3倍、正確度は同2倍向上しているとのこと。同社のサイトによると、新しいソフトウェア「インテラ3」によって「速度、正確度、モーション・クオリティーが2倍以上向上した」と書かれている。
下は、昨年と現在のバクスターを比較したビデオだ。確かに動きが機敏だ
下のスライドは、同社のプラットフォームの考え方を描いたもの。
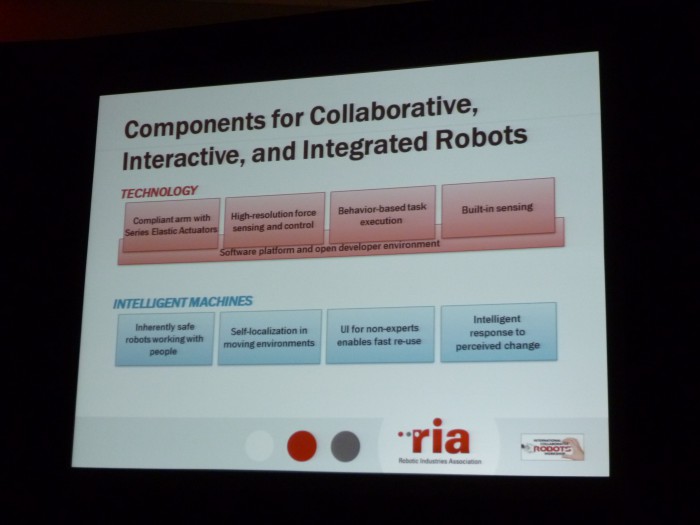
機能上の向上を続けながら、インテリジェント性も付加しているということで、その際に上記のような項目を捉えている。
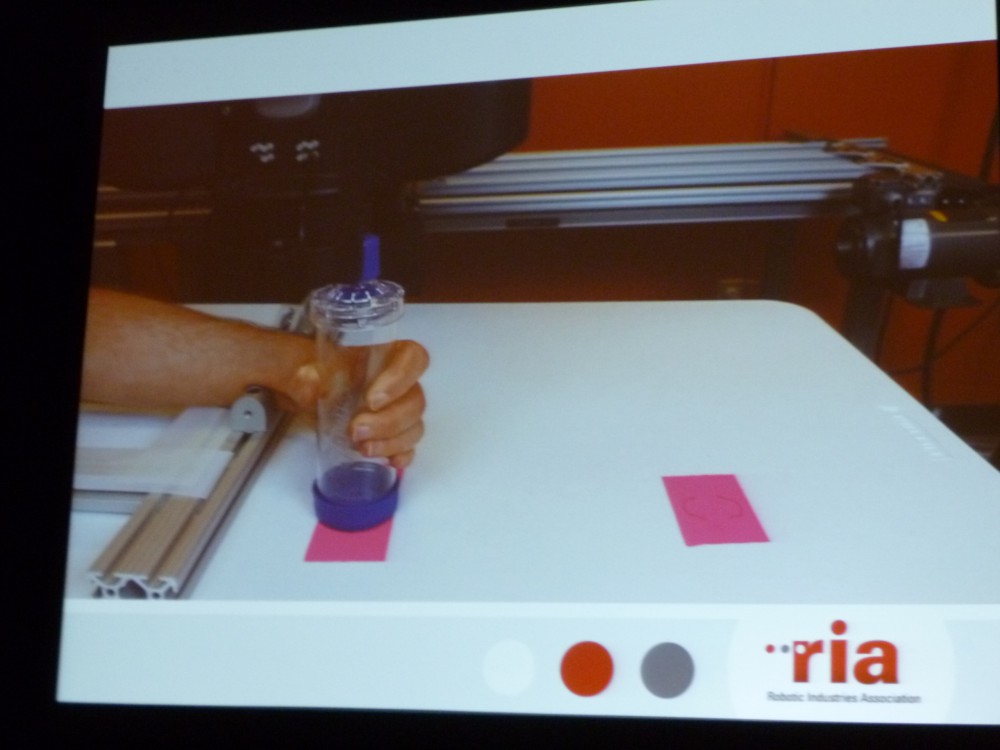
最近バクスターに加わった機能は、「フォース・センシング」。触れたこと、ぶつかったことがわかるというもの。これまでも人に危害を与えないようコンプライアンス上の設計は行われていたが、新しいフォース・センシングは具体的な作業上でも役立つようだ。
たとえば、容器にふたをするといった作業の場合、ふたをつかむのは画像認識で行うが、ふたをするところではふたが容器に当たる反発力を感知して位置を認識する。位置制御ではなく、フォースを使うのだ。人間が手応えに頼る方法と似ている。
また接触も感知し、人の手も認識できるという。手渡しのような作業もできるらしい。接触した場合は、各ジョイントごとにその力を計測する。
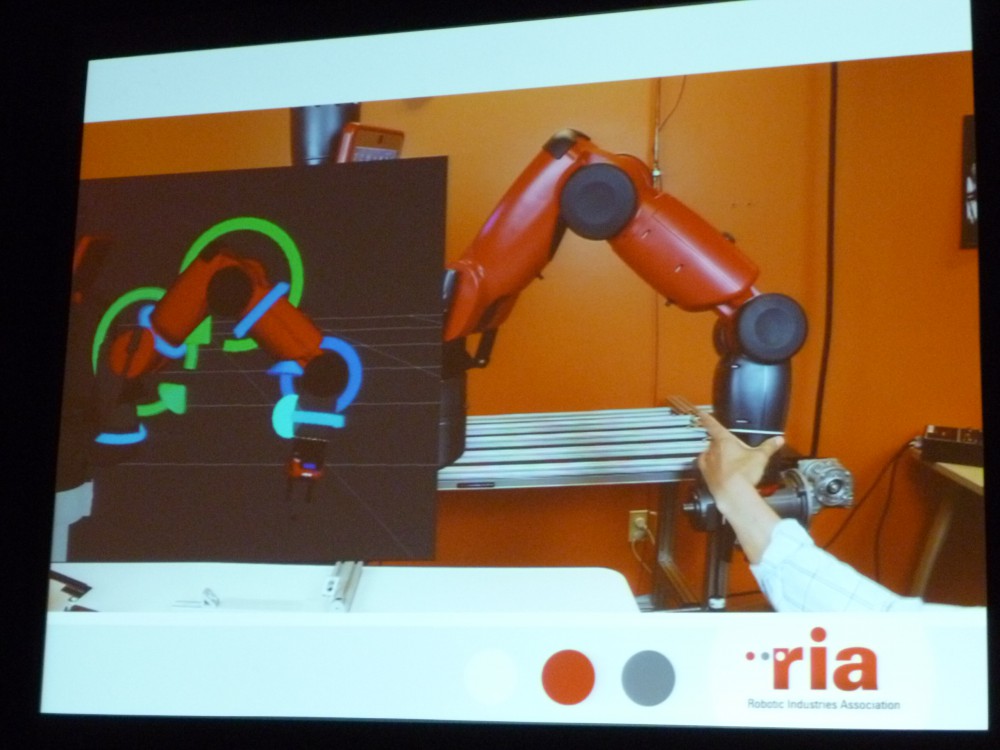
もうひとつの機能は、ポジショニング・システム。作業環境の中で作業台がずれたりしてもそれを認識して、作業の動きを合わせる。これには、マーカーと画像認識が使われており、最初に位置の基点を示すマーカーを登録することで可能になる。それを説明するビデオが下だ。
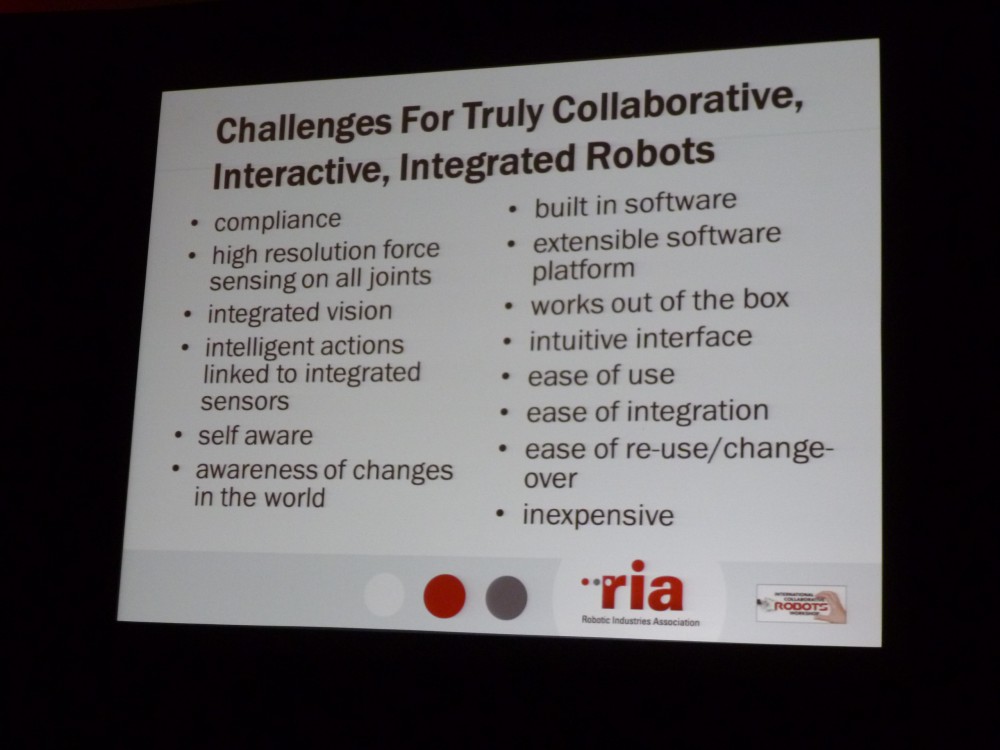
そして、下のスライドはコラボラティブで、インタラクティブでインテグレートされたロボットの課題をリストアップしたもの。
ところで、1週間ほど前にアップされたバクスターの現在のプロモーション・ビデオは下。最初の頃はプラスティックの容器を箱詰めしているだけだったが、「こんなに難しいこともできるようになりました」というアピールのようだ。ブルックス氏は、今年8月以降同社の顧客が増えたと語っていた。
さて、モバイル・マニピュレーターでは、2枚のスライドをご紹介したい。
下は、アデプト・テクノロジー社CTOのデロン・ジャクソン氏の講演では、同社がテストしているさまざまなモバイル・マニピュレーターが紹介されたが、これは最後に出てきたもの。 これからの製造現場にはフレキシビリティーが求められるが、たとえばこうした方法も一案。
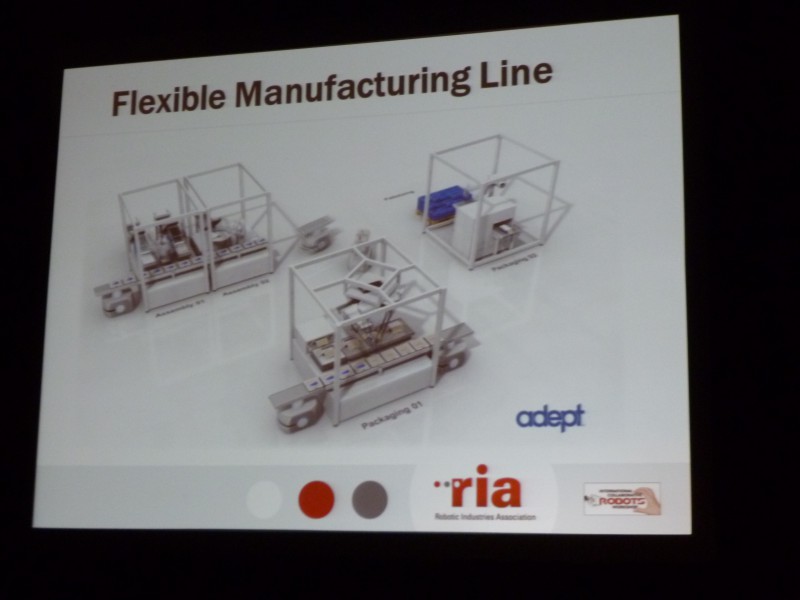 各ロボット・セルの中には多様なロボットが入っているかもしれないが、ベルトコンベヤーで固定せずに、ベルトコンベヤーの一部がモバイル・ロボットになっているという図だ。もちろんこれにマニピュレーターを載せるということもあるだろう。
各ロボット・セルの中には多様なロボットが入っているかもしれないが、ベルトコンベヤーで固定せずに、ベルトコンベヤーの一部がモバイル・ロボットになっているという図だ。もちろんこれにマニピュレーターを載せるということもあるだろう。
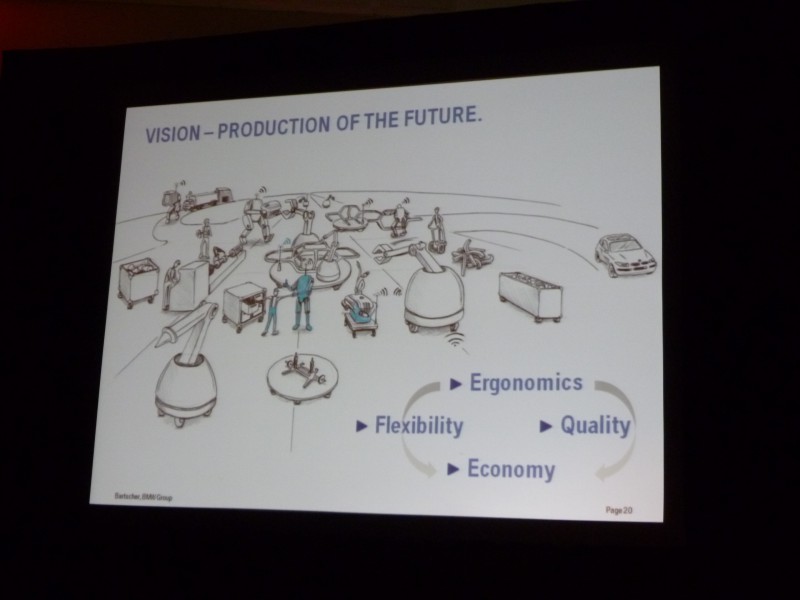
また下は、BMW社の製造部門のイノベーション管理および技術計画のトップであるシュテファン・バーチャー氏の講演から。「未来の製造はモバイルになる」と同氏は語っていた。モバイル・マニピュレーター型のロボットが作業をおこない、中に時々人が入っているという図だ。
また、現時点では、コラボラティブ・ロボットに最適な安全基準が求められているということでは、参加者の意見が一致している。これはここしばらくの議論の中心になるだろう。